o
p
t
i
m
a
r
o
b
o
t
i
c
s
Make a Call
Make a Call
Blogs
How to Build Your Own Robot Arm at Home?
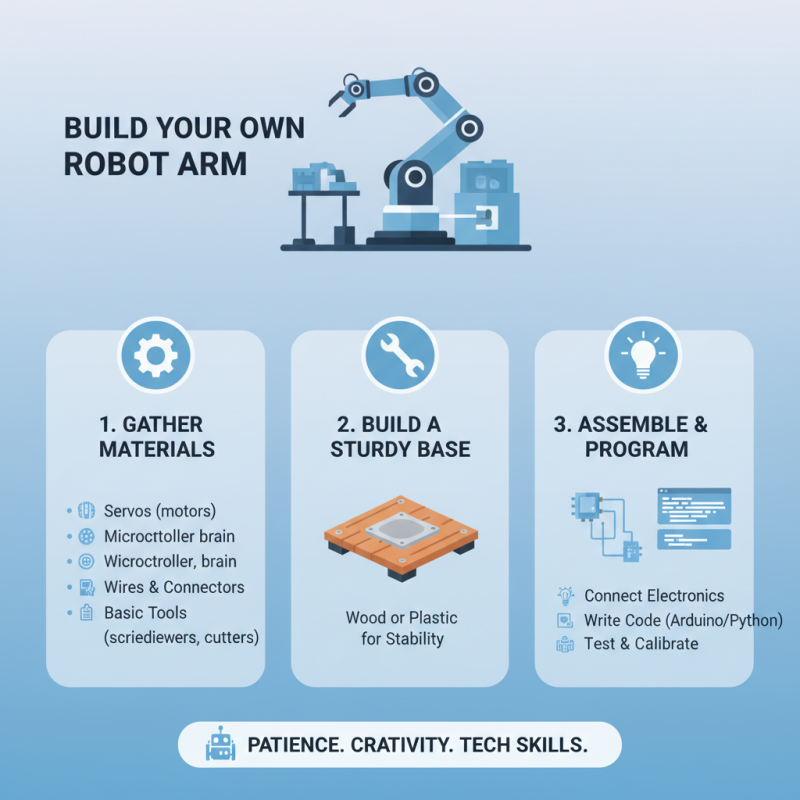
Building your own robot arm at home can be an exciting project. It allows you to explore engineering and programming concepts in a hands-on way. With the right materials and tools, you can create an impressive device. Imagine maneuvering your robot arm with precision, or programming it to perform tasks.
When making your robot arm, thinking about the design is key. You may not have access to advanced equipment, but you can use basic items. Cardboard, wood, or even plastic bottle caps can serve as great materials. Don’t be afraid to experiment with different structures. Each attempt can teach you something valuable.
Consider the challenges you might face. The joints may not move as smoothly as expected. Calibration could take time and effort. Reflect on these issues; they are part of the process. Embrace the trial and error, and remember, building "ur robot arm" is about learning and creativity. Your efforts will lead to a unique creation that you can proudly call your own.

Table of Contents
[Hide]
Understanding the Basics of Robot Arm Design and Functionality
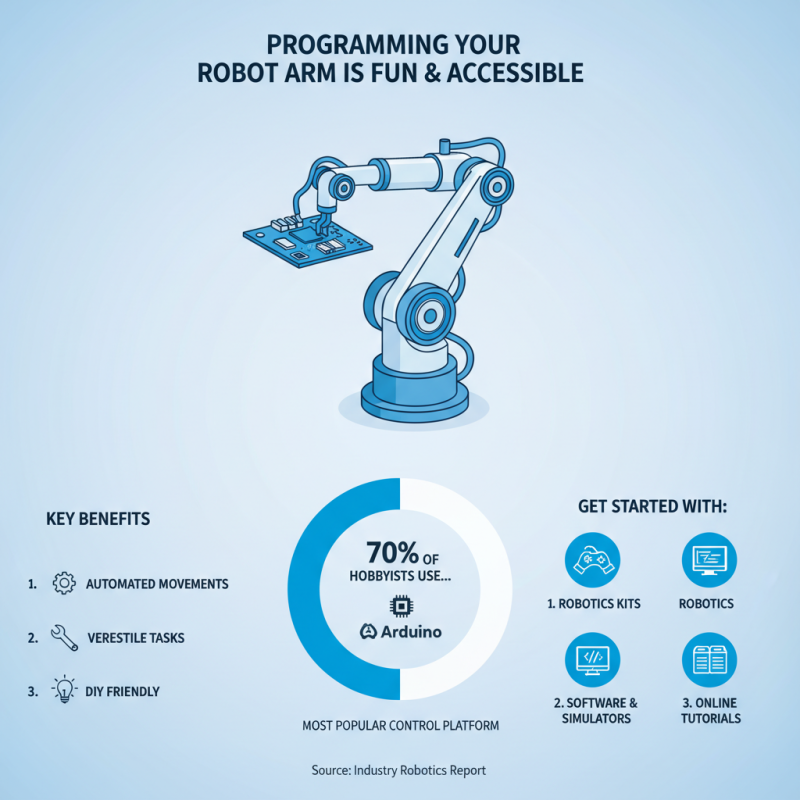
Building a robot arm at home can be a rewarding experience. Understanding the basics of design and functionality is essential. A robot arm mimics human motion through joints and segments. It typically has a series of motors and sensors to control movement. According to recent reports, the robotics market is projected to grow significantly. This growth reflects increased interest and accessibility in robotics for hobbyists.
When starting your design, consider the degrees of freedom your arm will need. A standard configuration may have four to six joints. This allows for versatile movement. Using lightweight materials can enhance performance. However, remember that lighter materials can make the arm less stable. You’ll need to strike a balance between weight and durability.
Tip: Start with simple prototypes. Use cardboard or plastic for trial designs. This allows for easy adjustments. Experimenting with different configurations can help identify what works best. Keep an eye on your motor selection too. Many hobbyists overlook this; a strong enough motor is crucial for proper movement. Reflecting on your early mistakes will guide your iterative design process. Don’t be afraid to experiment, but also keep a journal of what works and what doesn’t.
How to Build Your Own Robot Arm at Home? - Understanding the Basics of Robot Arm Design and Functionality
| Component | Description | Materials | Estimated Cost ($) |
|---|---|---|---|
| Microcontroller | Main control unit for programming and operation | Plastic, Silicon | 25 |
| Servomotors | Actuators for moving the robot arm | Metal, Plastic | 60 |
| Chassis | Structure to mount components | Aluminum, Wood | 30 |
| Sensors | For detecting position and obstacles | Silicon, Plastic | 40 |
| Power Supply | Source of energy for all components | Plastic, Metal | 20 |
Related Posts
-

Top 10 Benefits of Using Cobot Robots in Industry?
-

Unleashing the Future: How Robot Technology is Revolutionizing Everyday Life
-

Unlocking the Future of Robotics Engineering Through Innovative Learning Approaches
-
Unlocking Creativity: How Small Robotic Arms Are Revolutionizing DIY Projects and Education
-

Exploring the Future of Work How Collaborative Robot Arms Are Revolutionizing Industries
-
How to Become a Robotics Engineer: Skills, Education, and Career Path
Brands
Proudly Trusted by Top Suppliers Worldwide
Let us know and we will automate, together to fit your industrial needs.
 +91-97254 16844
+91-97254 16844Clients
Proudly Trusted by Top Companies Worldwide
Do you need Help? Get in touch.
X
Please fill out the form below and we will get back to you as soon as possible.